| Hardware: |
Anforderungen:
- Regelmäßige Befliegung auch in geringen Zeitabständen von wenigen Minuten sollen möglich sein, um z.B. bei Sonnenuntergang das Schräglicht bestmöglich zu nutzen
- Einsatz im In- und Ausland soll möglich sein, daher ist ein robustes Gerät notwendig
- Schnelle Einsatzbereitschaft und einfache Wartung, gute Reparaturmöglichkeiten
- Waypointflug
|
Aussuchen des Fluggerätes:
- Die erste Überlegung war einen Heliumballon oder -blimp der durch ein Trossensystem gesteuert werden sollte. Allerdings wurde diese Idee relativ schnell wieder verworfen, da diese einige Nachteile aufwiesen:
- Windanfälligkeit
- Teure Heliumfüllung, da ein großes Volumen nötig wäre um die Last zu heben
- Umständlicher Auf- und Abbau mit viel Equipment
- Der Auf- und Abbau dauert lange
- Trossen unter Umständen auf dem Bild zu sehen
- Das Eqipment ist schwer und unhandlich
- Als zweite Überlegung wurde ein Helikopter oder Flugzeug aus dem Modellbaubereich in Betracht gezogen. Durch einige private Tests ergaben recht schnell, das der Elektro-Heli und Flugzeuge ungeeignet sind. Die Gründe sind dafür:
- Modellhelikopter sind zu schwer zu steuern und bieten zu wenig Nutzlast. Ein Modellhelikopter mit Verbrennungsmotor kam aufgrund des Preises nicht in Frage, dieser hätte jedoch die Nutzlast tragen können
- Ein Modellflugzeug könnte für den Einsatzzweck auch in der Stadt nicht benutzt werden, da es zuviel freien Platz zum starten und landen benötigt. Dazu braucht es zudem Platz für den Überflug. Es bietet aber, wenn man die großen Segelflugmodelle betrachtet, die Möglichkeit, Gebiete zu untersuchen, die bisher von Luftbildarchäologen wenig beflogen sind. Das konnte aber innerhalb dieses Projektes nicht mehr realisiert werden.
|

Bildquelle: Wikimedia Commons

Bildquelle: Wikimedia Commons

Bildquelle: Wikimedia Commons |
- Nach einigem Suchen stießen wir auf einen Quadrokopter, dieses Fluggerät schien für unser Vorhaben genau das Richtige zu sein. Die Vorteile des ganzen sind:
- Es ist sehr gute Hard- und Software verfügbar, die durch eine große Community ständig erprobt und weiterentwickelt wird. Diese ist modular aufgebaut und kann beliebig erweitert werden. Zudem sind Teile der Steuerungssoftware opensource.
- Für einen geübten Modellbau-Piloten ist der Quadrokopter leichter zu steuern als ein Helikopter
- Die Software hat eine sehr gute Flug- und Lagestabilität
- Windausgleich durch das GPS und Schwebeflug möglich, dazu Waypointflug
- Der Quadrokopter ist agil und handlich
- Insgesamt relativ�preisgünstig
|

Bildquelle: www.powerframe.de |
| |
|
| Software: |
|
- Eingabe von relevanten Daten wie Kamera und Objektiv
- Auswahl bzw. Eingabe des zu befliegenden Areals durch Karte oder GPS-Daten
- � Berechnung der Flugroute auf Basis einer vorgegebenen Flughöhe, dem Areal, der Brennweite des Objektivs und der Sensorgröße der Kamera
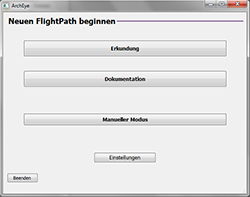
- Mehrere Modi:
- Erkundung:
Durch Vergrößerung der Flughöhe kann mehr Übersicht gewonnen werden. Gleichzeitig sind nicht so viele
Daten wie bei einer Dokumentation notwendig.
- Dokumentation:
Es werden hier
wichtige dokumentatorische Daten eingegeben, zum Beispiel Grabungsnummer, Ort, Gewann, Planum, Befunde und mehr. Diese stehen dann auch bei der Auswertung zur Verfügung
- Manuelles Stitching:
Zum nachträglichen Verbinden von Fotos
- Graphische Oberfläche auf Qt-Basis
|
 |